Einzigartige Bewegungsformen aus der Natur
Biologisches Vorbild für den BionicWheelBot ist die Radlerspinne (Cebrennus rechenbergi). Sie lebt in der Wüste Erg Chebbi am Rande der Sahara. Dort hat sie Prof. Dr.-Ing. Ingo Rechenberg, Bionik-Professor an der TU Berlin, im Jahr 2008 entdeckt. Die Radlerspinne kann wie andere Spinnen laufen. Sie kann sich aber auch mit einem kombinierten Ablauf aus Flug- und Bodenrolle fortbewegen. Damit passt sie sich optimal an ihre Umgebung an: Auf ebenem Untergrund ist sie im so genannten Rollmodus doppelt so schnell wie beim Laufen.
Seit er die Spinne entdeckt hat, befasst sich Prof. Rechenberg mit dem technischen Übertrag ihrer Bewegungsmuster. Aus den zahlreichen Untersuchungen konstruierte Rechenberg mit seinem Team bereits einige Vormodelle des BionicWheelBot. Die Kinematik und das Antriebskonzept der künstlichen Spinne hat er nun gemeinsam mit Festo im Rahmen des Bionic Learning Networks weiterentwickelt.
BionicWheelBot: Transformation vom Lauf- in den Rollmodus
Genau wie die echte Spinne bewegt sich der BionicWheelBot im wechselseitigen Dreibeinlauf. Das heißt, er nutzt sechs seiner acht Beine zum Laufen. Um ins Rollen zu kommen, formt der BionicWheelBot links und rechts von seinem Körper jeweils drei Beine zu einem Rad. Zwei beim Laufen eingeklappte Beine fahren nun aus, stoßen die zusammengekugelte Spinne vom Boden ab und schieben sie während des Rollens permanent an. So verhindern sie, dass der BionicWheelBot stecken bleibt und sorgen dafür, dass er sich auch in unwegsamem Gelände fortbewegen kann.
Im Rollmodus macht der BionicWheelBot analog zur natürlichen Radlerspinne mit seinem gesamten Körper einen Überschlag. Dank des integrierten Intertialsensors weiß er dabei immer, in welcher Lage er sich befindet und wann er sich wieder abstoßen muss. So ist auch er im Rollen wesentlich schneller als beim Laufen und kann sogar Steigungen von bis zu fünf Prozent bergauf bewältigen.
BionicFlyingFox – ideale Flugbahn durch Machine Learning
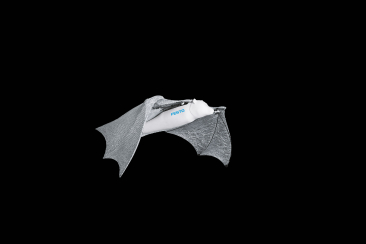
Um dem natürlichen Flughund so nahe wie möglich zu kommen, ist die Flügelkinematik des BionicFlyingFox in Arm- und Handschwinge gegliedert und alle Gelenkpunkte liegen auf einer Ebene. Darüber ist eine elastische Haut gespannt, die sich von den Flügeln bis zu den Füßen fortsetzt. Diese Flughaut ist hauchdünn, ultraleicht und gleichzeitig robust.
Motion-Tracking-System für teilautonomes Fliegen
Damit sich der BionicFlyingFox in einem definierten Luftraum teilautonom bewegen kann, kommuniziert er mit einem so genannten Motion-Tracking-System. Die Installation mit zwei Infrarotkameras erfasst permanent seine Position. Zwei Infrarotkameras, die auf einer Schwenk-Neige-Einheit sitzen, lassen sich so drehen und kippen, dass sie den gesamten Flug des BionicFlyingFox vom Boden aus verfolgen können. Gleichzeitig plant das Motion-Tracking-System die Flugbahnen und liefert die dazu nötigen Steuerbefehle. Start und Landung führt der Mensch aus. Im Flug übernimmt ein Autopilot.
Maschinelles Erlernen der idealen Flugbahn
Die Bilder der Kameras gehen an einen zentralen Leitrechner. Er wertet die Daten aus und koordiniert den Flug wie ein Fluglotse von außen. Dazu liegen auf dem Rechner vorprogrammierte Pfade, die dem BionicFlyingFox bei seinen Manövern die Flugbahn vorgeben. Die nötigen Flügel- und Fußbewegungen, um die Sollbahnen optimal umzusetzen, berechnet der künstliche Flughund mithilfe seiner On-Board-Elektronik und komplexer Verhaltensmuster selbst. Die dafür notwendigen Regelalgorithmen erhält der Flughund vom Leitrechner, wo sie maschinell erlernt und permanent verbessert werden. Dadurch kann der BionicFlyingFox sein Verhalten während der Flüge optimieren und so die vorgegebenen Bahnen von Runde zu Runde präziser nachfliegen.
Innovative Flughaut für verschiedene Einsatzgebiete
Die innovative Flughaut hat das Bionik-Team speziell für den BionicFlyingFox entwickelt. Sie besteht aus zwei luftdichten Folien und einem Elastan-Gestrick, die an circa 45.000 Punkten miteinander verschweißt sind. Die Wabenstruktur des Gestricks verhindert, dass kleine Risse in der Flughaut sich weiter vergrößern. Damit kann der BionicFlyingFox selbst bei leichten Beschädigungen des Gewebes weiterfliegen. Aufgrund der Elastizität bleibt die künstliche Flughaut auch beim Einziehen der Schwingen nahezu faltenfrei. Da die Folie nicht nur dehnbar, sondern auch luftdicht und leicht ist, ist sie auch für den Einsatz in anderen Flugobjekten sowie für die Bereiche Kleidung und Architektur interessant.
Bionic Learning Network
Seit mehr als zehn Jahren hat Festo das Bionic Learning Network ins Leben gerufen, welches eng mit den Innovationsprozessen im Unternehmen verzahnt ist. In Kooperation mit Studenten, namhaften Hochschulen, Instituten und Entwicklungsfirmen fördert Festo dabei Projekte, Versuchs- und Technologieträger. Ziel ist es mit Hilfe der Bionik, neue Technologien aufzuspüren und in die industrielle Automation umzusetzen.
Festo ist gleichzeitig Global Player und unabhängiges Familienunternehmen mit Sitz in Esslingen am Neckar. In der industriellen Automatisierungstechnik und technischen Bildung setzt Festo seit seinen Anfängen Maßstäbe und leistet damit einen Beitrag zu einer nachhaltigen Entwicklung von Umwelt, Wirtschaft und Gesellschaft. Das Unternehmen liefert pneumatische und elektrische Automatisierungstechnik für 300.000 Kunden der Fabrik- und Prozessautomatisierung in über 35 Branchen. Wachsende Bedeutung erhalten Bereiche wie Digitalisierung, KI sowie LifeTech mit Medizintechnik- und Laborautomation. Produkte und Services sind in 176 Ländern der Erde erhältlich. Weltweit rund 20.600 Mitarbeitende in rund 60 Ländern mit über 250 Niederlassungen erwirtschafteten 2025 einen Umsatz von ca. 3,33 Mrd. €. Davon werden jährlich über 8 % in Forschung und Entwicklung investiert. Im Lernunternehmen beträgt der Anteil der Aus- und Weiterbildungsmaßnahmen 1,5 % vom Umsatz. Festo Didactic SE ist führender Anbieter in technischer Aus- und Weiterbildung und bietet seinen Kunden weltweit umfassende digitale und physische Lernlösungen im industriellen Umfeld an.